
01
Meta-Intelligence and Meta-Learning
メタ知能とメタ学習
学習能力は固定されたものではありません。脳は、自らの学習状態や記憶の確かさを評価し、 報酬、罰、誤差、不確実性に応じて、学習の仕方そのものを変化させます。 私たちは、技能の選択、運動記憶の検索可能性、学習率の調整、誤差学習と報酬学習の切り替えを、 メタ知能を構成する計算過程として研究しています。行動実験と計算モデルに加え、 脳刺激や神経介入を用いて、その因果的な神経機構を明らかにします。
RESEARCH
私たちは、人間を脳・身体・環境から構成される階層的な適応システムとして捉えています。 脳は単に環境に適応するだけではなく、自らの学習状態を評価し、使用する記憶や技能、 学習方略そのものを選択・更新します。私たちは、この上位の適応能力を 「メタ知能」と呼び、その計算原理と神経機構を、行動実験、計算モデル、 神経計測、ロボティクス、人工知能、神経介入を統合して研究しています。
01
学習能力は固定されたものではありません。脳は、自らの学習状態や記憶の確かさを評価し、 報酬、罰、誤差、不確実性に応じて、学習の仕方そのものを変化させます。 私たちは、技能の選択、運動記憶の検索可能性、学習率の調整、誤差学習と報酬学習の切り替えを、 メタ知能を構成する計算過程として研究しています。行動実験と計算モデルに加え、 脳刺激や神経介入を用いて、その因果的な神経機構を明らかにします。
02
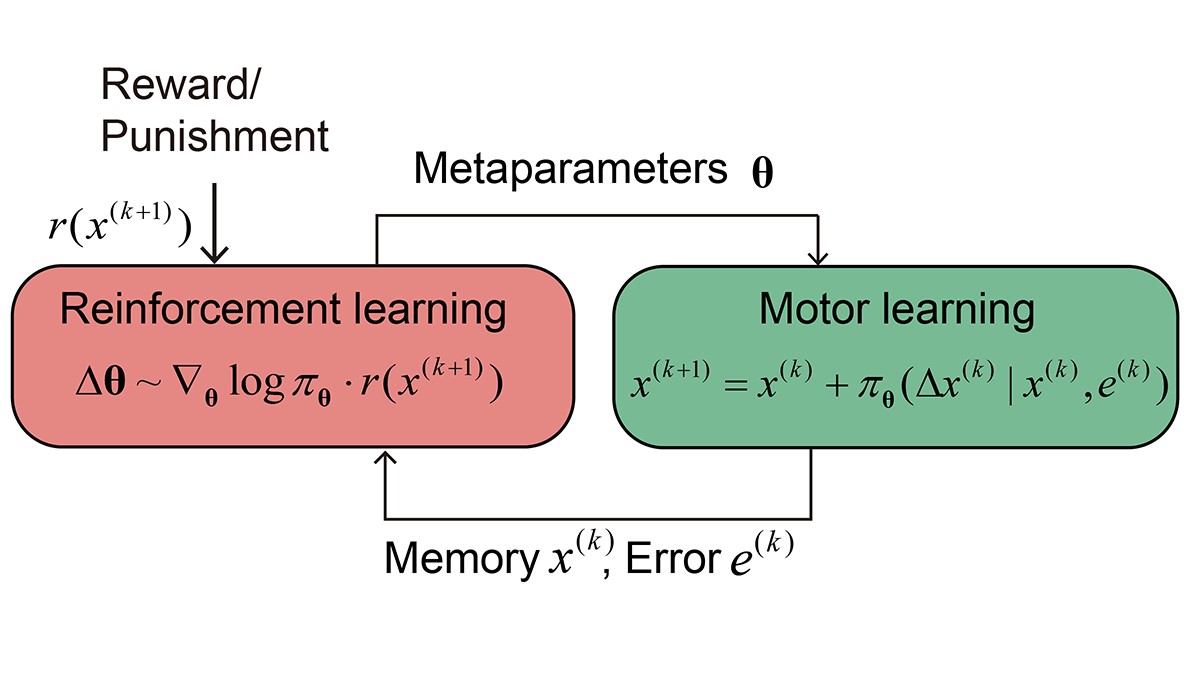
人間の運動は、正確さだけを目的としているわけではありません。 脳は、努力、時間、失敗の可能性、身体的コスト、得られる報酬を統合し、 どの行動を選択するかを決定します。私たちは、運動制御を価値に基づく意思決定として捉え、 強化学習、運動探索、報酬予測誤差、主観的な運動コストの計算機構を研究しています。 この研究は、運動学習と意思決定を統合する神経運動経済学の構築につながります。
03
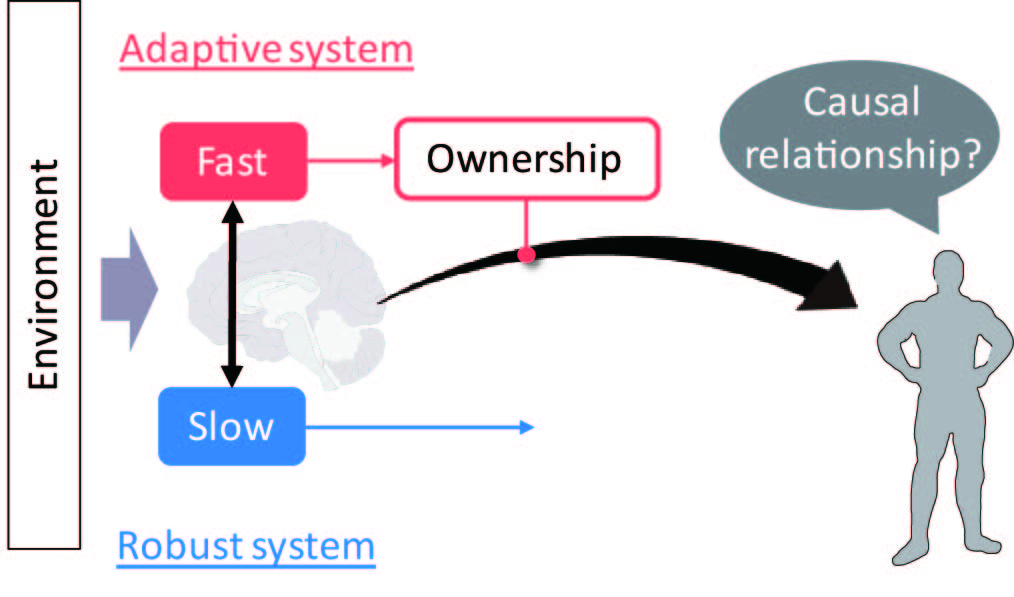
自分が行動を生み出しているという自己主体感と、自分の身体が自分に属しているという身体所有感は、 脳が身体運動を予測し、その結果と感覚入力を照合することで形成されます。 私たちは、運動記憶と身体予測が、自己主体感、身体所有感、身体イメージをどのように形成するかを研究しています。 バーチャルリアリティやロボティクスを用いて身体と感覚の関係を操作し、 身体化された自己の計算原理を明らかにします。
04
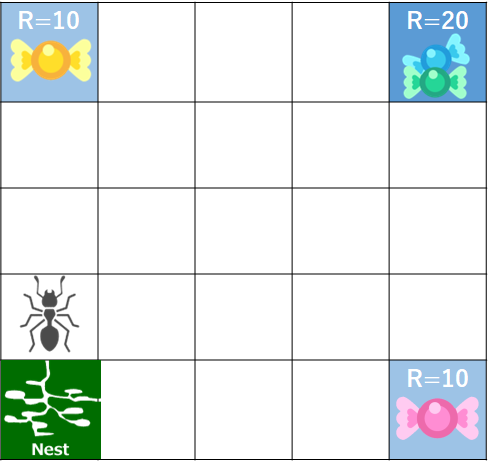
人間は、実際に得られた結果だけでなく、 「別の行動を選んでいれば、よりよい結果になったかもしれない」という反実仮想からも学習します。 後悔や安心といった感情は、この比較を将来の意思決定へ反映するための学習信号と考えられます。 私たちは、人間の感情的意思決定を計算モデルとして記述するとともに、 反実仮想と感情的価値を利用して柔軟に学習する人工知能の設計を研究しています。

05
未経験の道具や身体、環境を操作するとき、脳は既存の運動記憶を修正するだけではなく、 新しい運動指令の表現を形成しなければなりません。 私たちは、身体が持つ多くの自由度を探索しながら、 新しい協調パターンや制御方略が形成される過程を研究しています。 運動探索、技能表現の形成、記憶の再利用と新規作成の関係を明らかにすることで、 人間が未知の技能を獲得する計算原理を理解します。
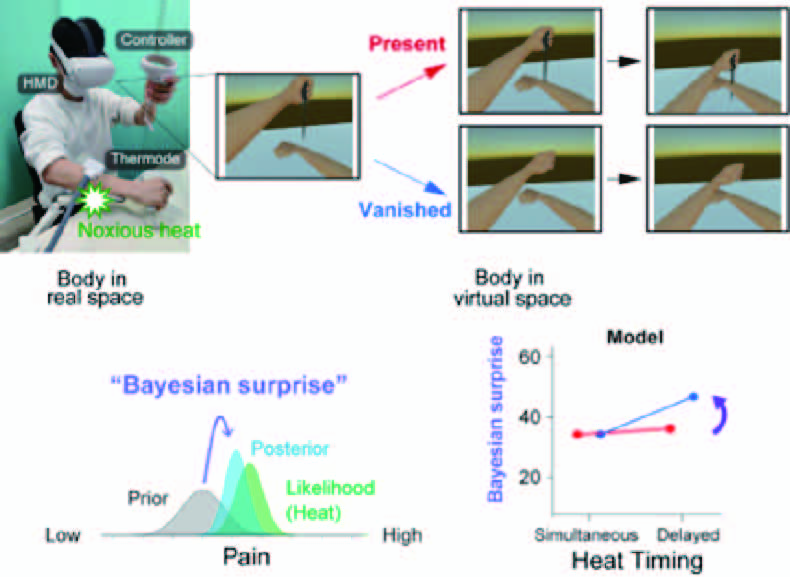
06
痛みは、侵害刺激の強さだけによって決まるものではありません。 脳は、過去の経験、予測、視覚情報、身体状態、感覚入力の不確実性を統合し、 現在の身体に生じている脅威を推定します。 私たちは、予測との不一致やベイズ的サプライズが痛み知覚を変化させる仕組みを、 バーチャルリアリティ、心理物理実験、計算モデルを用いて研究しています。 これらの知見を、個人の認知特性に応じた新しい疼痛管理へつなげます。
- All rights reserved by HEBB’S Lab -
