01
Meta-Intelligence and Meta-Learning
Learning how to learn
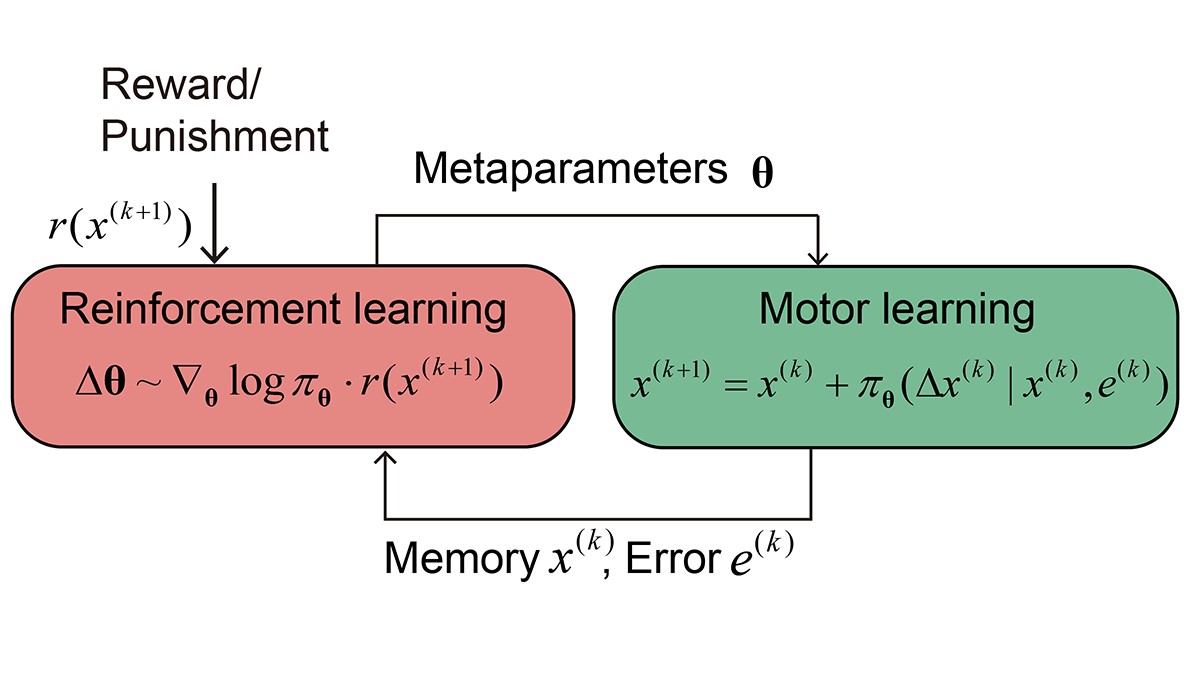
Our capacity to learn is not fixed. The brain evaluates its own learning state and the reliability of its memories, and modifies how it learns in response to reward, punishment, error, and uncertainty. We investigate skill selection, the future retrievability of motor memories, the regulation of learning rates, and the switching between error-based and reward-based learning as computational components of meta-intelligence. In addition to behavioral experiments and computational modeling, we use brain stimulation and causal neural interventions to identify the underlying neural mechanisms.